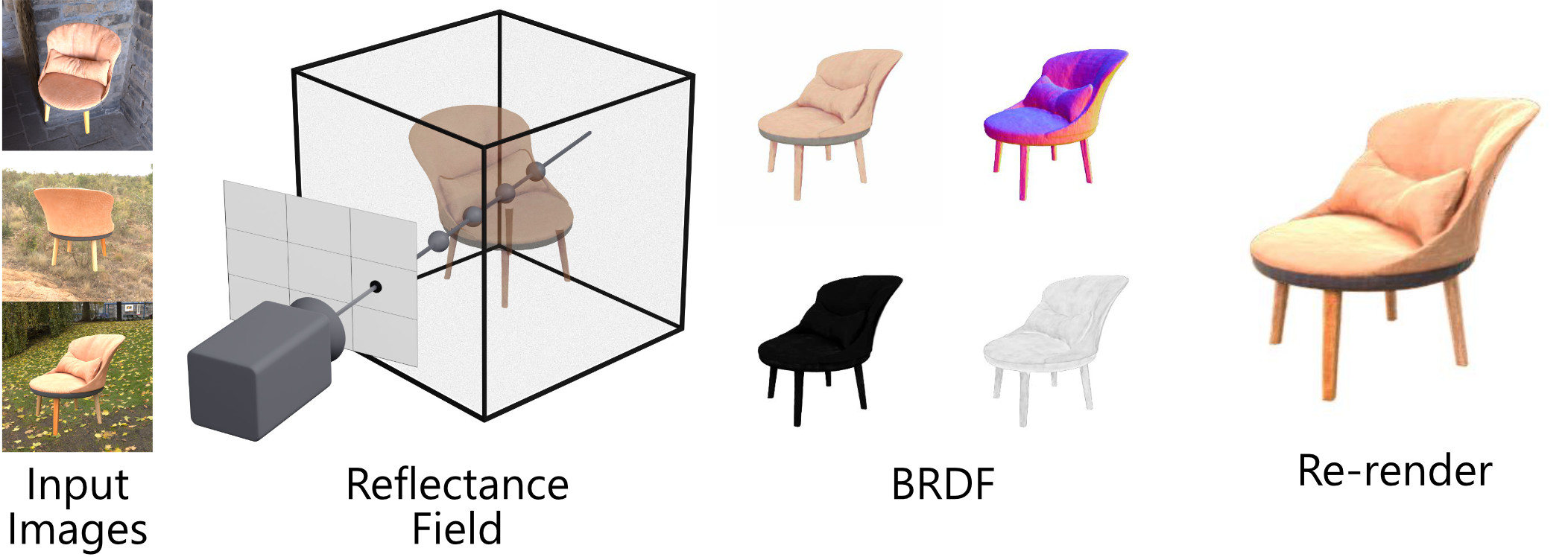
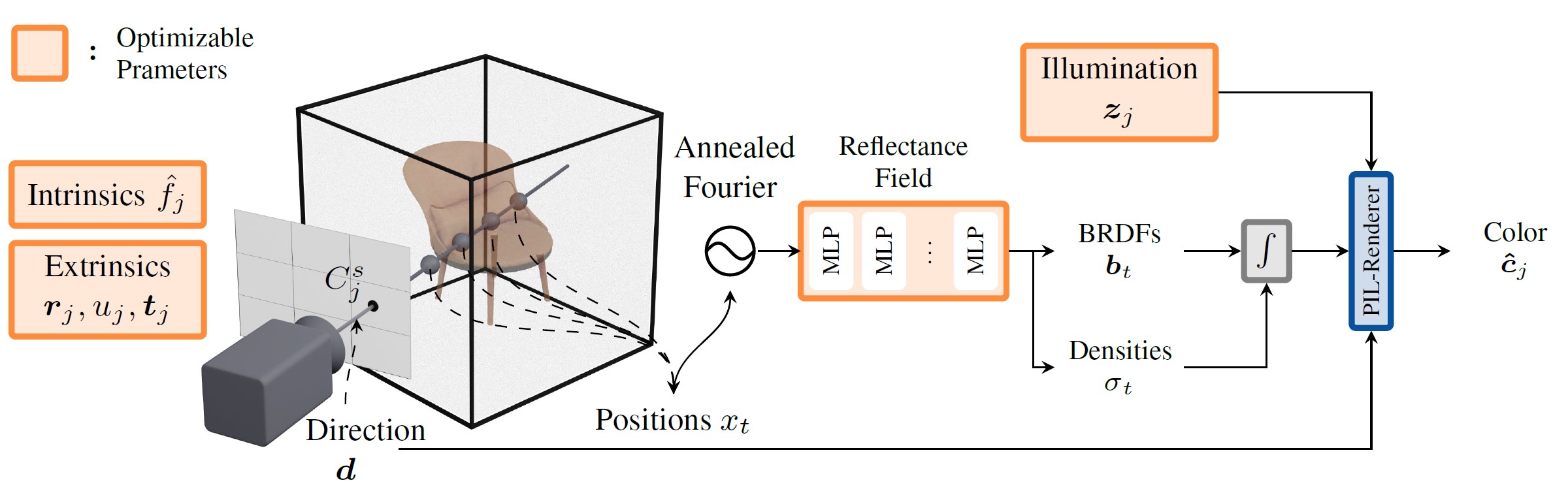
SAMURAI
Shape And Material from Unconstrained Real-world Arbitrary Image collections
Mark Boss, Andreas Engelhardt, Abhishek Kar, Yuanzhen Li, Deqing Sun, Jonathan T. Barron, Hendrik P. A. Lensch, Varun Jampani
Shape And Material from Unconstrained Real-world Arbitrary Image collections
Mark Boss, Andreas Engelhardt, Abhishek Kar, Yuanzhen Li, Deqing Sun, Jonathan T. Barron, Hendrik P. A. Lensch, Varun Jampani






[1] Mildenhall et al. - NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis - 2020
[1] Boss et al. - NeRD: Neural Reflectance Decomposition from Image Collections - 2021
[2] Boss et al. - Neural-PIL: Neural Pre-Integrated Lighting for Reflectance Decomposition - 2021
| Method | Pose Init | PSNR ↑ | Translation Error ↓ | Rotation° Error ↓ |
|---|---|---|---|---|
| BARF [1] | Directions | 14.96 | 34.64 | 0.86 |
| GNeRF [2] | Random | 20.3 | 81.22 | 2.39 |
| NeRS [3] | Directions | 12.84 | 32.77 | 0.77 |
| SAMURAI | Directions | 21.08 | 33.95 | 0.71 |
| NeRD | GT | 23.86 | — | — |
| Neural-PIL | GT | 23.95 | — | — |
[1] Lin et al. - BARF: Bundle-adjusting neural radiance fields
[2] Meng et al. - GNeRF: GAN-based Neural Radiance Field without Posed Camera
[3] Zhang et al. - NeRS: Neural reflectance surfaces for sparse-view 3d reconstruction in the wild
| Method | Pose Init | PSNR ↑ | Translation Error ↓ | Rotation° Error ↓ |
|---|---|---|---|---|
| BARF-A | Directions | 19.7 | 23.38 | 2.99 |
| SAMURAI | Directions | 22.84 | 8.61 | 0.89 |
| NeRD | GT | 26.88 | — | — |
| Neural-PIL | GT | 27.73 | — | — |
| Method | Pose Init | PSNR ↑ |
|---|---|---|
| BARF-A | Directions | 16.9 |
| SAMURAI | Directions | 23.46 |
Project page available at: markboss.me/publication/2022-samurai/